
It’s about time that I continue writing about misunderstandings surrounding weak measurements and weak values. This time I will try to explain the difference between weak measurements and noisy measurements.
Why weak?
One of the first things we learn about quantum mechanics is that the measurement process causes an unavoidable back-action on the measured system. As a consequence, some measurements are incompatible, i.e. the result of a measurement on observable A can change significantly if a different observable, B, is measured before A. A well known example is the measurements of position and momentum where the back-action leads to the Heisenberg uncertainty relation.
The measurement back-action can create some seemingly paradoxical situations when we make counterfactual arguments such as
We measured A and got the result a, but had we measured B we would have go the result b which is incompatible with a.
These situations appear very often when we consider systems both past and future boundary conditions. In these cases they are known as pre and post selection (PPS) paradoxes. In PPS paradoxex the measurement back-action is important even when A and B commute. An example is the three box paradox that I explain without mathematical detail:
A single particle is placed in one of three boxes A,B,C (actually in a superposition) at time t0 and is later found to be in some other superposition state at t1. At time t0< t m < t1 one box is opened. The initial t0 and final t1 states of the particle are chosen in such a way that the following happens:
If box A is opened, the particle will be discovered with certainty. If box B is opened, the particle will also be found with certainty. If box C is opened the particle will be found with some probability. The situation seems paradoxical:
If the ball is found with certainty in box A, then it must have been in box A to begin with. But if it is also found with certainty in box B, so it must have been there …
One way to solve this apparent paradox is to note that the measurements are incompatible. i.e opening box A and not B,C is incompatible with opening box B and not A,C etc.
These are the types of questions that Aharonov Albert and Vaidman were investigating 1980s1 . Weak measurements were studied as a way to minimize the measurement back-action. These measurements then provided a picture that arguably gives a solid (if somewhat strange) foundation to statements like the one above.
The motivation of weak measurements is therefore an attempt to derive a consistent picture where all observables are mutually compatible in a way which is similar to classical physics. In quantum mechanics this comes at a cost. The classical information gained by reading out the result of a single weak measurement is usually indistinguishable from noise. In other words weak measurements are noisy measurements.
Weak, not noisy
Part of the confusion around weak measurements lies in the fact that the statement above is not a sufficient condition for a weak measurement. One may argue noise is not even a necessary requirement, it is rather, a consequence of quantum mechanics. Weak measurements may be noisy, but noisy measurements are, in most cases, not weak. To understand this fact it is good to examine both a classical and quantum scenario.
The classical scenario
Walking on the beach you see a person drowning. Being a good swimmer you go in and try to save this person. As you get back to the beach you see that he is not responsive and decide to to find if he is alive. You are now faced with the choice of how to perform the measurement.
A weak measurement – You try to get a pulse – The measurement is somewhat noisy since the pulse may be too weak to notice. It is also a weak measurement since it is unlikely to change this person’s state.
A noisy measurement – You start screaming for help. There is some small chance that the guy will wake up and tell you to shut up.
A noisy, strong measurement – You start kicking the guy in the head, hoping that he regains conciseness. This is a strong measurement, but it is also noisy. The person might be alive and you still won’t notice after kicking his head, moreover the kick in the head might kill him.
The quantum scenario
You want to find the 
A weak measurement – Perform the usual von Neumann measurement with weak coupling. There is still some back-action but if the coupling is sufficiently weak you can ignore it. The down side is that you will get very little information.
A noisy measurement – Perform the weak measurement as above, but follow it with a unitary rotation and some dephasing.
A noisy, strong measurement – Perform a standard projective measurement, but then add extra noise at the readout stage. This could, for example, be the result of a defective amplifier.
While all of the measurements above are noisy, only the weak measurements follow the original motivation of making a measurement with a weak back-action.
An extreme example
One neat example of a measurement which is noisy but not weak involves a wave function with a probability distribution that has no tails.
Take the measurement of a Pauli observable that has results 
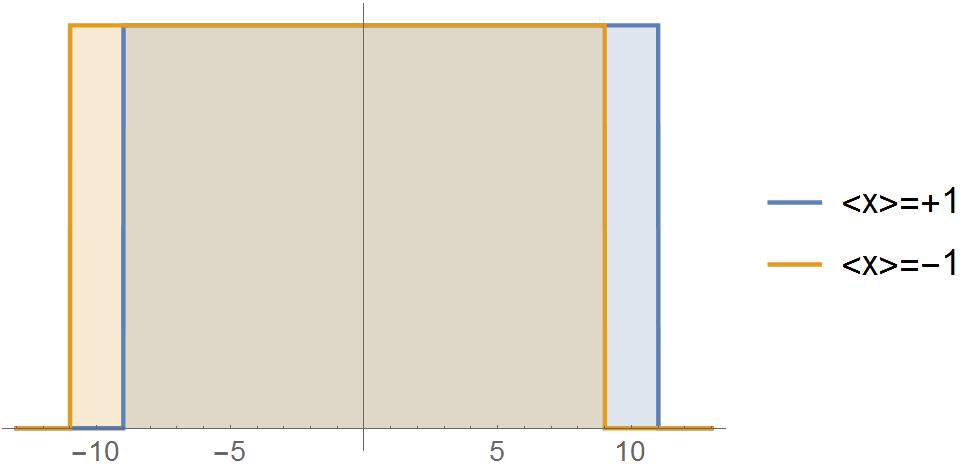
A pointer with no tails: The probability density function for the result of a dichotomic measurement. A +1 state will produce the blue distribution while a -1 state will produce the orange one. Although a result between -9 and +9 will provide no information, the measurement is still not weak.
It is not surprising that this type of measurement will not produce a weak value as the expectation value of a given set of measurements on a pre and post selected system. While this is is obviously an extreme case, any situation where the probability density function for the readout probabilities has no tails will not be weak for the same reason. The same is usually true in cases where the derivatives of the probability density function are very large. In less technical terms – noise is not a sufficient condition for a weak measurement.
1. To get a partial historic account of what AAV were thinking see David Albert’s remarks in Howard Wiseman’s QTWOIII talk on weak measurements (around minute 25-29) ↩
